Arduino UNO に関する記事です。
Arduino が何なのか?というのは Wikipedia でどうぞ。Arduino UNO の詳細については公式サイトを確認してください。
MCU は Atmel ATmega328P で、書き込めるスケッチの最大サイズは 32,256 バイト (約 32KB) です。
| ボードサイズ | 普通 | 小さい | ||
| 書き込み装置 | あり | なし | あり | なし |
| ATMega328P | Arduino Uno | Arduino Pro | Arduino Nano | Arduino Pro Mini Arduino Mini (05) |
| ATMega32U4 | Arduino Leonardo | Arduino Leonardo (ピンソケット無し) |
Arduino Micro Da Vinci 32U*1 |
Pro Micro*2 |
*1 Strawberry Linux 社の製品で正式な Arduino ではない。 *2 SparkFun 社の製品で正式な Arduino ではない。
See Also:
Amazon 等で買えます。
表面実装 (SMD) 版もありますが、純正の SMD 版にはほぼメリットがないため DIP 版の購入をオススメします。
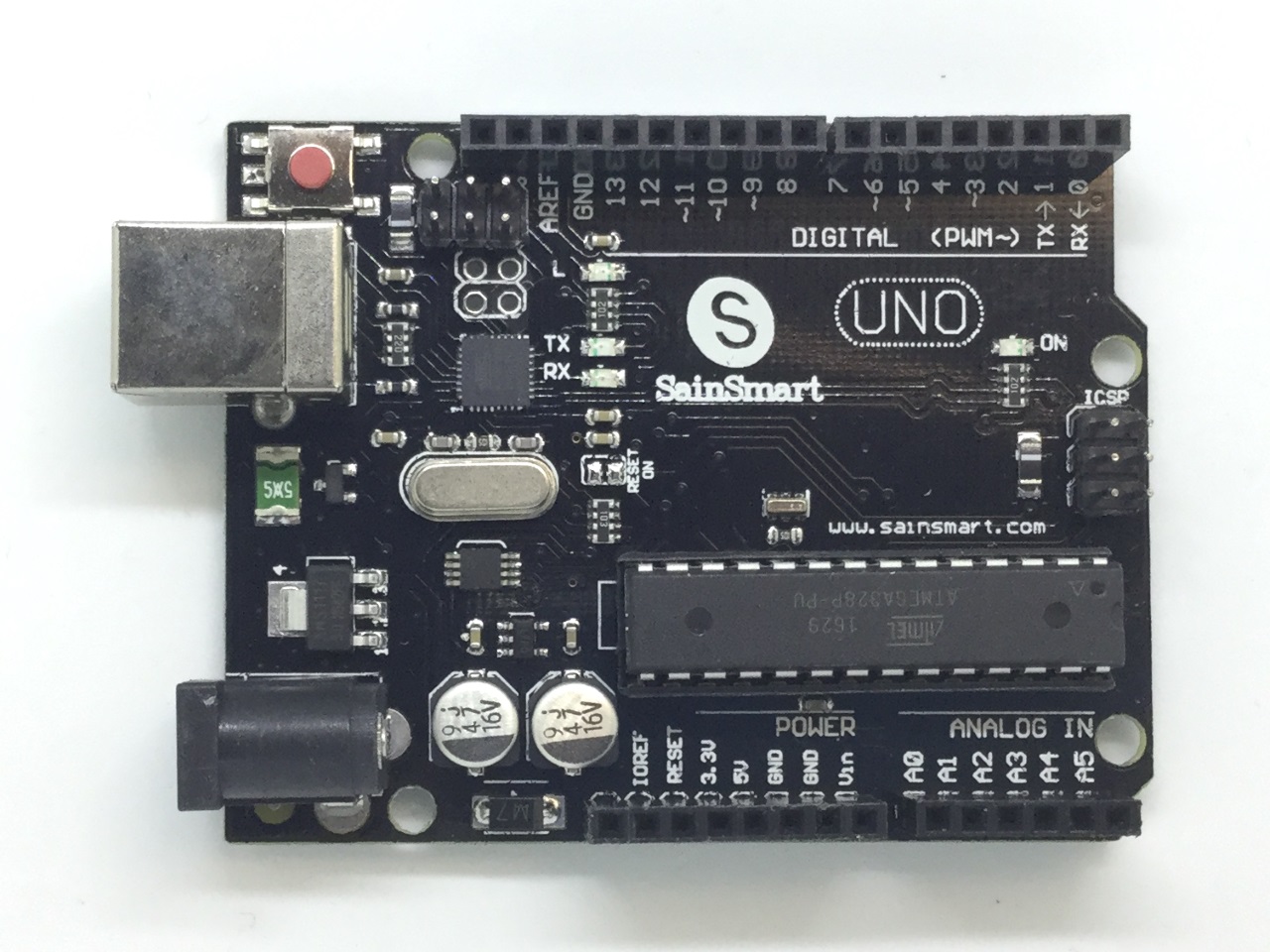
私が購入したのは SainSmart 社の互換機です (DIP 版 / SMD 版)。

Arduino UNO は安価なコピー品が出回っていますが、最初の一台目は正規品か完全互換品を選ぶのがよろしいかと思います。うまく動作しない場合に、ボードのせいなのか自分のやり方が悪いのかを切り分けることが困難になるからです。
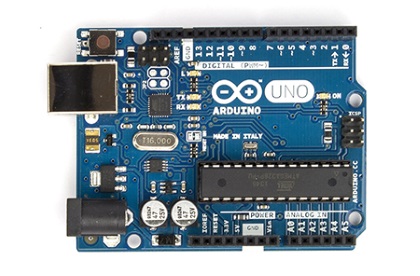
オリジナルの UNO R3 の各部詳細はこのような感じです。

下の画像はサインスマートの互換機のものですが、拡張ピンヘッダを除けばオリジナルの UNO R3 とほぼ同じです (アナログピンが A7 まであります)。付属の A ケーブルは太く短く取り回しが利かないため、もう少し長いケーブルを用意した方がいいかもしれません。

他にも安価な互換機が数多く出回っていますが、左上の USB コネクタの近くに 6 ピンのピンヘッダ (ICSP2) がないものは USB<->シリアルに Atmega16U2 が使われていない (恐らく CH340G 使用) と思われるので避けたほうがいいでしょう。

SPI 用のピンは D13~D10 です。
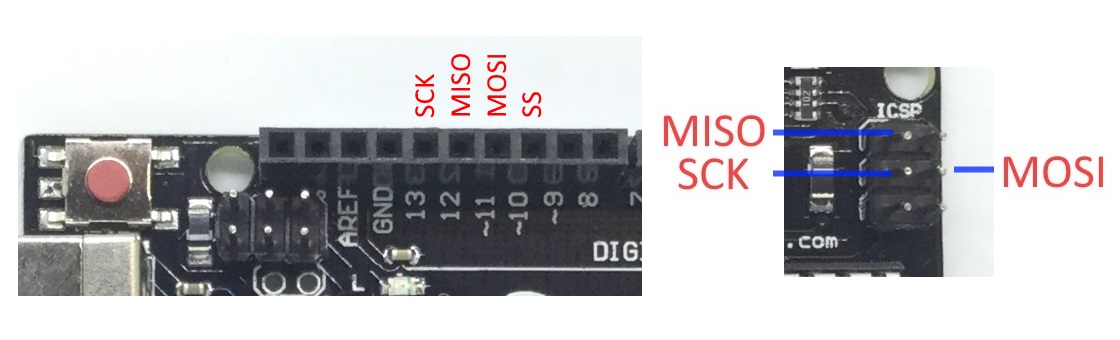
ICSP 端子を使えば他ボードとピン互換にできます (SS は除く)。
| UNO | LEONARDO | MEGA 2560 | |
| SCK | D13 / ICSP 3 | ICSP 3 | D52 / ICSP 3 |
| MISO | D12 / ICSP 1 | ICSP 1 | D50 / ICSP 1 |
| MOSI | D11 / ICSP 4 | ICSP 4 | D51 / ICSP 4 |
| SS | D10 | (TX LED) | D53 |
I2C 用のピンは A4 / A5 です。

R3 で拡張された SCL / SDA ピンを使えば他ボードとピン互換にできます。
| I2C | UNO | LEONARDO | MEGA 2560 |
| SCL | A5 / SCL | D3 / SCL | D21 / SCL |
| SDA | A4 / SDA | D2 / SDA | D20 / SDA |
Arduino UNO には Timer0/ Timer1 / Timer2 の 3 つのタイマーがあります。
| Timer0 | Timer1 | Timer2 |
| D5 / D6 | D9 / D10 | D3 / D11 |
Timer を使用する関数やライブラリを使用すると思わぬ落とし穴に遭遇する事があります。
See Also:
まずは Arduino Software を DL します。

普通にインストールしてください。難しいことはありません。但し...
Arduino UNO の VID は 2341、PID は 0043 です。
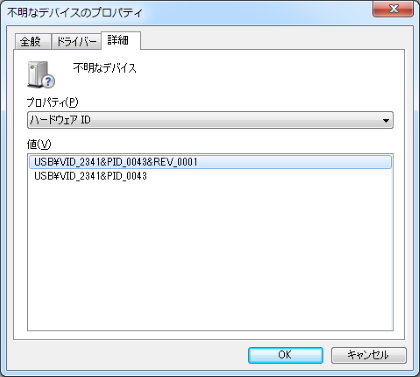
ドライバは Arduino Software に含まれており、自動的にインストールされます。正しくインストールされたら、Arduino UNO を PC と接続します。正常に接続されると仮想 COM ポートとして認識されます。
COM13 として認識されていますね。この状態でデジタルピンの 13 と GND に (色は何でもいいので) LED を挿してみましょう。足の長いほうが 13、短いほうが GND です。

一秒おきに LED が点滅すると思います…いわゆる "Lチカ" ですね。

どうやら最初から Lチカスケッチ (プログラム) が入っているようです。
See Also:
言語リファレンスは [ヘルプ | リファレンス] で閲覧できます。実体は Arduino IDE インストールフォルダの reference サブフォルダにあります。Web 上にもあります。
See Also:
SainSmart の UNO R3 互換機 (サインスマート改造バージョン) を使う場合には、3.3V / 5V 切り替えスイッチを 5V 側にしておく必要があります。
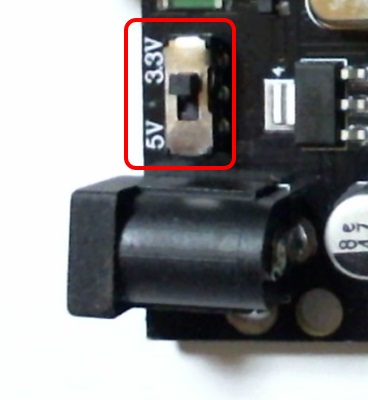
ここが 3.3V 側になっているとアナログポートを使う UNO 用のスケッチがうまく動かない事があります。
まずは書籍などのチュートリアルをこなしてみるといいでしょう。
ここにある情報が役に立って、「調べる手間が省けたからオマイに飯でもおごってやるよ」 というハートウォーミングな方がいらっしゃいましたら、下のボタンからどうぞ。


{kind=link}